



Egy mérnök, aki három égitestre tervezett járműveket. Egy bemutató, ami alapjaiban változtatta meg a holdkutatást. Honfitársaink, akik kiérdemelték az Egyesült Államok Nemzeti Repülési és Űrhajózási Hivatala (NASA) díját. Hold- és marsjárók, amelyek a szó szoros és átvitt értelmében is utat törtek maguknak, valamint a technológiai fejlődésnek. A Sojourner ráadásul majdnem napra pontosan 27 éve gurult a vörös bolygóra.
Ahogy korábbi írásunk végén jeleztük, ezúttal az űrkutatás kiemelkedő magyar tervezőmérnökeinek munkásságát elevenítjük fel. A jelen cikk egyrészről bevezeti a 3D nyomtatás az űrkutatásban című sorozatot, másrészről e történeti visszatekintésnek szomorú apropója is van. Idén február 13-án, Santa Barbarában eltemették a NASA-díjas Pavlics Ferencet, akiről kevesen tudják, hogy három égitestre tervezett járműveket. A Holdra a Lunar Roving Vehicle-t (az LRV-t), a Marsra a Sojourner-t, majd a Spirit-et és az Opportunity-t, a Földre pedig a Santa Barbara-i elektromos buszokat.
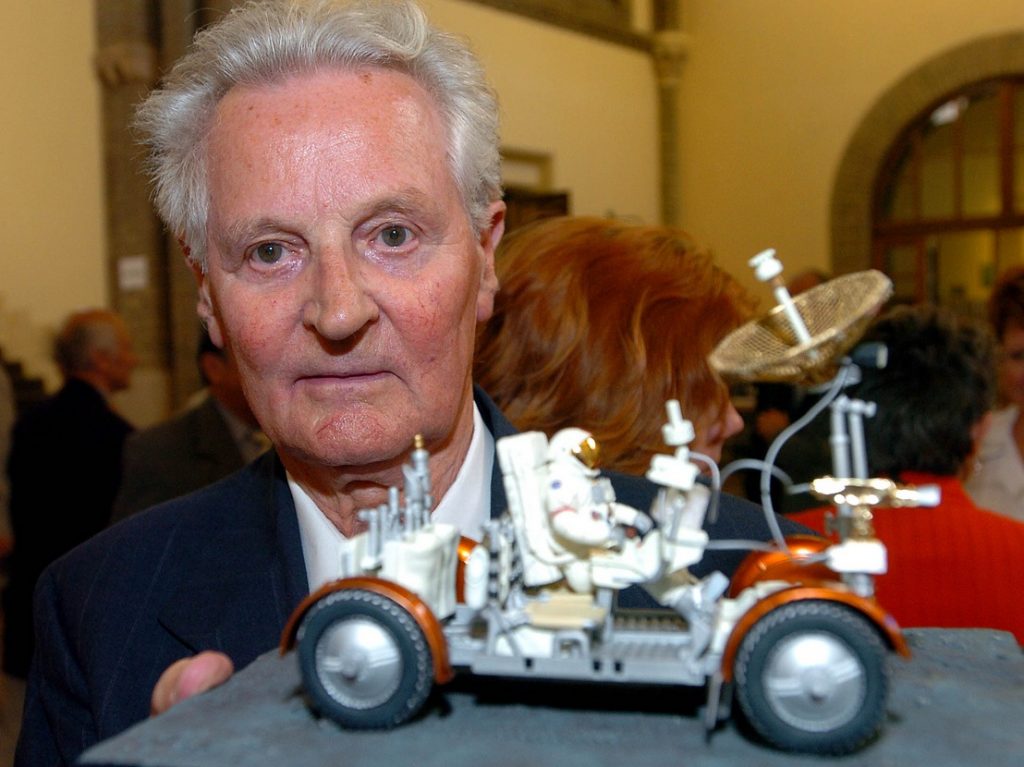
Pavlics Ferenc 1928. február 3-án született a Vas vármegyei Balozsameggyesen (a mai Meggyeskovácsiban). 1950 szeptemberében a Budapesti Műszaki Egyetemen szerzett gépészmérnöki diplomát. 1957-ben Detroitban, a General Motors-nál (GM-nél) műszaki rajzolóként kezdett dolgozni, mivel nem beszélt angolul. 1970-től viszont már műszaki igazgatóként vezette a teljes holdjáró programot. A tervezéstől a teszteléseken át a kivitelezésig mindent ő irányított.
A bemutató, ami megváltoztatta a holdkutatást
Egy évvel korábban, 1969-ben a GM két mérnöke, Sam Romano és Pavlics Ferenc az Alabama állambeli Huntsville-be, a NASA Marshall Űrrepülési Központjába, Wernher von Braun igazgatóhoz – a Saturn V rakéták atyjához – vitte az 1:6-os méretarányú holdjárót. Pavlics hétéves fia G. I. Joe űrhajós figuráját tette a járműbe, majd a rádiótávirányítású modellt Braun irodájába navigálta. A bemutató lenyűgözte az igazgatót, aki azonnal megértette, hogy az Apollo-programnak szüksége van a Lunar Roving Vehicle-re (vagyis a roverre, amit Moon buggy-ként is emlegettek). Néhány héttel később, 1969 áprilisában Braun projektirodát hozott létre a jármű megalkotására. A holdjáró végül 400 ember munkájának eredményeként, 17 hónap alatt készült el.
A NASA követelményei
A kocsitól elvárták, hogy a Hold felszínén biztonságosan mozogjon a két űrhajóssal, a tudományos műszerekkel és 40 kilogramm holdkőzettel. A járműnek 25 fokos emelkedőt, 30 centiméter magas akadályt és 70 centiméter széles krátert kellett leküzdenie. Oldalirányba még 45 fokos lejtőn sem borulhatott fel. A rovernek továbbá mínusz 160 és plusz 125 Celsius fok közti hőmérsékleti tartományban kellett működnie.
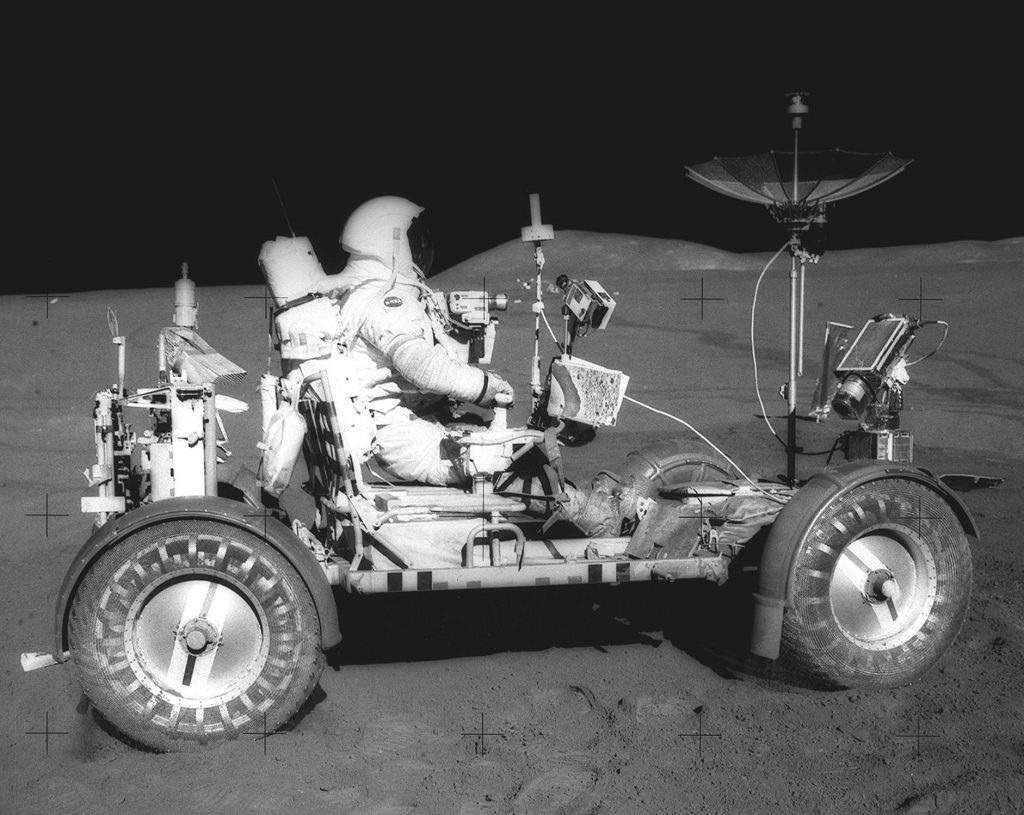
Ahhoz, hogy a jármű a Holdon sikeres legyen, mérnöki bravúrok sorozatára volt szükség. A tervezők munkáját ugyanis több jelentős fizikai korlát nehezítette. A jármű 208 kilogramm önsúlyának 520 kilogramm terhet kellett elbírnia. A 7,28 köbméter térfogatú rover elhelyezésére az Apollo Lunar Module-on (a kétlépcsős holdkompon) pedig mindössze 2,48 köbméteres tér állt rendelkezésre. Pavlics emiatt összehajthatóra tervezte a járművet, így a csuklós kivitelű, alumíniumötvözetű alváz három részből állt. A rover 3,1 méter hosszú, 2,06 méter széles, valamint 1,14 méter magas volt.
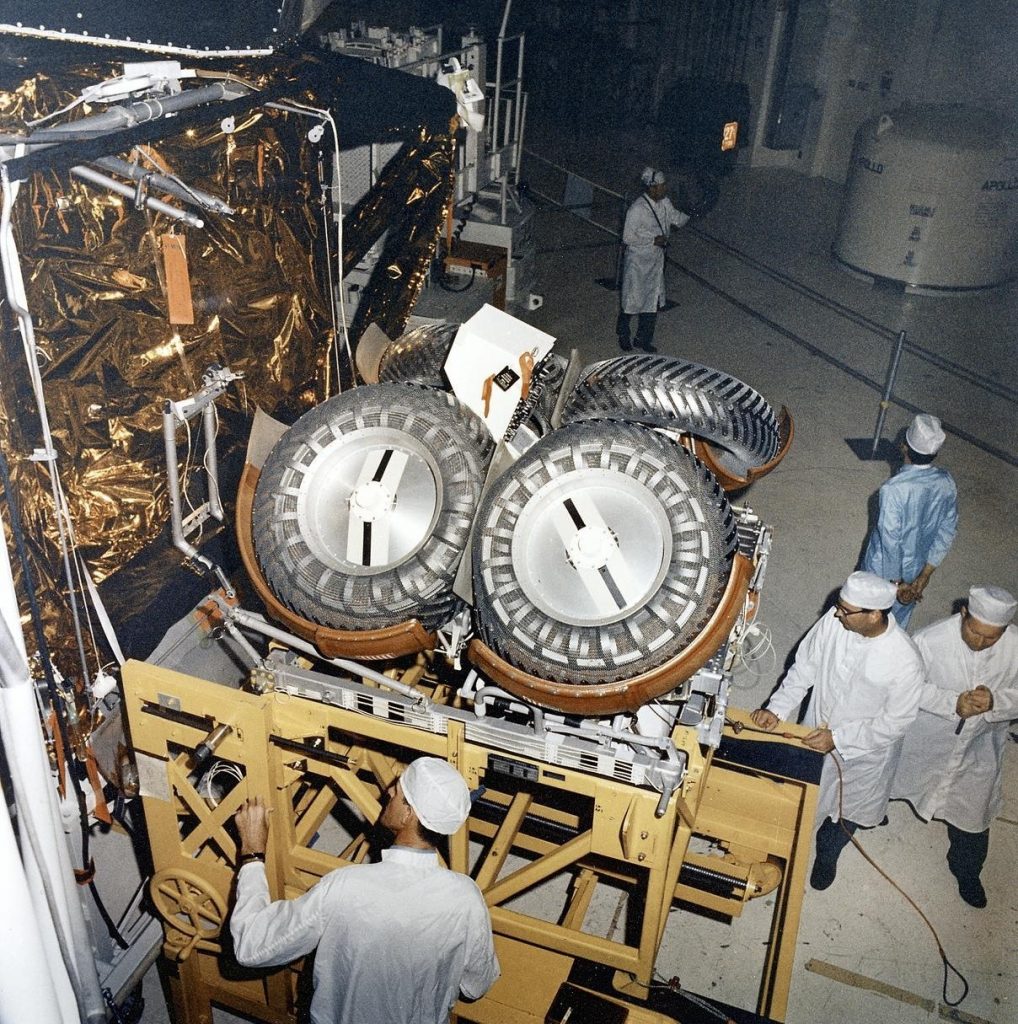
A holdjáró négykerék-kormányzást és -hajtást kapott. A kerekeket egymástól függetleníthető, 0,25 lóerős villanymotorok hajtották. A hajtás könnyen oldható volt annak érdekében, hogy meghibásodás esetén bármelyik kerék szabadon futhasson. A „T” alakú, kissé csavart szárú botkormány középre került, így az autót mindkét űrhajós kényelmesen vezethette. A jármű áramellátását két 36 Volt feszültségű, ezüst-cink-kálium-hidroxid, nem tölthető, 121 amperóra kapacitású akkumulátor biztosította.
A legkomolyabb kihívást a keréktervezés jelentette. A 81 centiméter átmérőjű és 23 centiméter széles drótkerék rengeteg kísérlet után készült el. Az abroncsrészt, 84 mikron átmérőjű volfrámbevonatos zongorahúrból, tórusz alakúra szőtték (a tórusz zárt felületű forgástest, ami két körvonal szorzataként írható le). A futófelületre – halszálkás elrendezésben – titánlemezeket szegecseltek. Így a kerekek a poros talajon csak 21-50 milliméter mélyre süllyedtek. Az abroncsban egy kis híján 65 centiméter átmérőjű fémkeretet is elhelyeztek, ami a talajegyenetlenségből adódó ütéseket fogta fel.
A jármű mechanikus fékrendszere parkoláskor rögzítette a kerekeket. Biztonsági okokból a kritikus rendszereket, mint az akkumulátort és a kormányművet, megkettőzték, hogy az űrhajósok műszaki hiba esetén is visszatérhessenek a holdkomphoz.
Ember vezette jármű a Holdon
A világon elsőként, 1971. július 31-én David R. Scott parancsnok vezetett járművet a Holdon. Az utazás 45 percig tartott. Az Apollo 15 expedíció két űrhajósa, David R. Scott és James Irwin a leszállóhelyétől három és fél kilométerre lévő Elbow-kráterhez autózott, majd visszatért a Falcon holdkomphoz. Az LRV-1 a küldetése során 3 óra 2 percig közlekedett, ezalatt 27,8 kilométert tett meg. (Emlékeztetőül: az Apollo 11 legénysége csak 250 méterre távolodhatott el a holdkomptól!) Az űrhajósok a rover segítségével 76,7 kilogramm kőzetet gyűjtöttek.
Az LRV-1 sikerét újabb küldetések követték. Az Apollo 16 misszióban, 1972. április 21-én az LRV-2-es jármű, az Apollo 17 programban pedig, 1972. december 11-én az LRV-3-as rover jutott a Holdra.
A Moon buggy-k eredményei
A Pavlics-féle autók összesen 10 óra 54 percig haladtak a Hold felszínén, műszaki hiba nélkül. Ezalatt 90,4 kilométert teljesítettek extrém időjárási körülmények között, továbbá 283,5 kilogramm holdkőzetet gyűjtöttek. Az űrhajósok több kilométerre is eltávolodhattak a holdkompoktól: a Falcontól 5, az Oriontól 4,5, míg a Challengertől 7,6 kilométerre. A három Moon buggy a Holdon maradt: az LRV-1 a Hadley-hegységben, az LRV-2 a Descartes-kráterben, az LRV-3 pedig a Taurus-Littrow-alakzat vidékén. „Egyike a legjobb kis masináknak, amit valaha vezettem” – mondta az LRV-3-ról Gene Carnan parancsnok. Hihetünk neki, hiszen ő állította fel a sebességrekordot a Holdon, amikor az LRV-3-mal elérte a 18 kilométer per órát.
A NASA első Mars-rovere
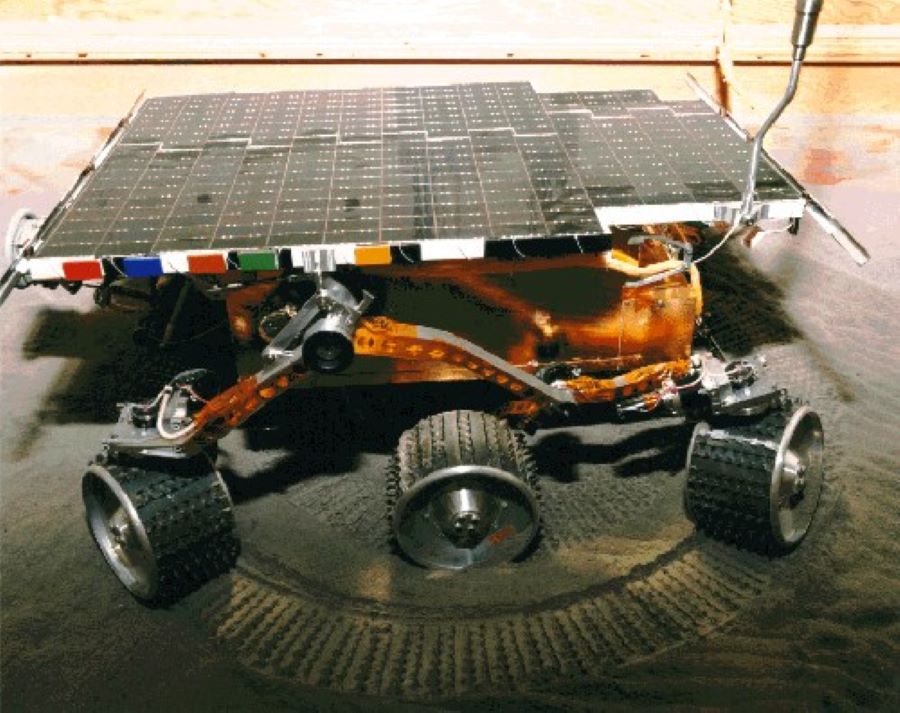
A Mars Pathfinder (felderítő) misszióban a Sojourner nevű rover 1997. július 4-én érkezett a vörös bolygóra. A járművet eredetileg hétnapos küldetésre tervezték, a feladata pedig az volt, hogy az általa bejárt 100 négyzetméteres területen felderítse a Mars terepét, fényképeket készítsen, valamint vegyi és légköri méréseket végezzen.
Történelmi pillanat a Marson – magyarok jóvoltából
Szinte pontosan 27 éve, 1997. július 5-én a hatkerék-meghajtású, billenő, forgóvázas kivitelű, 65 centiméter hosszú, 48 centiméter széles és 30 centiméter magas, 10,5 kilogrammos jármű, a Sojourner kigurult a Marsra. A rover hat 13 centiméter átmérőjű, egymástól független meghajtású keréken gurult. Az autó a tetején lévő, 16 Watt teljesítményű napelem miatt percenként csak 40 centiméteres sebességet érhetett el. A napelem alatt kaptak helyet az elektronikus mérőeszközök, a tölthető akkumulátorok és a hőszabályozást biztosító berendezések. Érdekesség, hogy a rover álló helyzetben meg tudott fordulni. Ez a jármű is Pavlics Ferenc irányításával készült.
Az irányítórendszer
A NASA-díjas Bejczy Antal professzor által vezetett csoport készítette a Sojourner irányítórendszerét. A kettős irányítású járműnek egyrészről fogadnia kellett a földi utasításokat, amelyek a Föld és a Mars egymáshoz viszonyított helyzetétől függően, 10–15 perc alatt érkeztek a vörös bolygóra. Másrészről a Sojourner rendelkezett egy önszabályozó rendszerrel, hogy a köztes időben is működhessen. A jármű lézersugárral tapogatta maga előtt a terepet, és a benne lévő számítógép utasításait hajtotta végre, ha akadályt észlelt. A számítógép egyszerre 70 ki- és bemeneti szenzorcsatornát kezelt, üzemeltette a jármű kamera- és kommunikációs rendszerét, a motorokat, illetve az elektronikát is.

Az optikai rendszer
A Sojourner a Greguss Pál által kifejlesztett optikai rendszert alkalmazta. A panoramikus gyűrűs lencsés (Panoramic Annular Lens, PAL) leképezés lényege, hogy a 360 fokos látószögű lencse a külvilág geometriáját hengeresen tükrözi vissza. Az optika az emberi szemhez hasonlóan képes a térből részleteket kiemelni. A megoldásért Greguss Pál 1989-ben NASA-díjat kapott.
Fotó: Jámbor Márk (wikipedia)
A Sojourner eredményei
A jármű a tervezett 7 helyett végül 83 napig működött. Összesen 550 képet készített, 15 kőzet- és talajkémiai elemzést végzett, továbbá rengeteg hasznos információt szolgáltatott az időjárási körülményekről. Utoljára 1997. szeptember 27-én sugárzott adatokat. A jármű a későbbi Spirit és Opportunity előfutárának tekinthető, ezekhez ugyanis a Sojourner számos kialakítását felhasználták.
A magyar mérnökök munkája nélkül tehát a NASA Hold- és Mars-programjai nem értek volna el ekkora sikert. Pavlics Ferenc olyan elektromos járműveket tervezett, amelyek más égitesteken, extrém körülmények között is működtek. Bejczy Antal új tudományágat hozott létre: ő a telerobotika (a nagy távolságról irányított járművek és robotok) atyja. Greguss Pál gyűrűs lencséjű optikai rendszere pedig forradalmasította a világűrben használható képalkotási technikát. Méltán lehetünk büszkék mindhármukra.
Következő írásunkban bemutatjuk, hogyan alkalmazható a 3D nyomtatás az űrkutatásban.
Nyitókép forrása: pexels.com


{kind=link}