





Szerző: Katona Gergő, NKE EJKK Kiberbiztonsági Kutatóintézet
Jelen részben az autonóm közúti járművek érzékelőihez kapcsolódó kihívásokat elemezzük. Ezek az érzékelők felelősek, hogy a jármű pontosan meg tudja határozni a helyzetét és a környezetének tulajdonságait.
A bejegyzés első részét itt, a második részét itt találja.
Az autonóm közúti járművek számos érzékelőre támaszkodnak a környezet valós idejű helymeghatározásához és érzékeléséhez. A lézeralapú távérzékelés (Light Detection and Ranging továbbiakban LiDAR), a kamera, a radar és a globális navigációs műholdrendszer (Global Navigation Satellite System, továbbiakban GNSS) a különböző autonóm vezetési rendszerek által használt fő érzékelők. Ezeket az érzékelőket a járművek redundánsan használják fel a lehető legpontosabb kép kialakításához, hiszen egy kamerarendszer ködös időben elég kis hatótávon érzékeli a környezetét. Az ezekből az érzékelőkből gyűjtött adatokat a rendszer többnyire gépi tanulási technológia segítségével alakítja át és dolgozza fel.
Ezek az érzékelők a távolságnak megfelelően különböző funkciókkal rendelkeznek:
- Kis hatótáv (5 méterig): Az ultrahangos érzékelők olyan távolságérzékelők, amelyeket a járműtől néhány méteren belüli objektumok érzékelésére terveztek. Főleg alacsony sebességű eseményekhez, például parkolás.
- Kis hatótávolságú érzékelés (30 méterig): a frontkamerákat sávelhagyásra való figyelmeztetésre és a közlekedési táblák érzékelésére, míg a hátulsó kamerákat a parkolás elősegítésére használják.
- Közepes hatótávolság (160 méterig): LiDAR, valamint közép hatótávolságú radarérzékelőket (MRR) használnak ütközés elkerüléshez és a gyalogos felismeréséhez.
- Nagy hatótávolságú érzékelés (160–250 méter): A nagy hatótávolságú radarokat (LRR) a nagy sebességű adaptív sebességtartó automatikához tervezték.
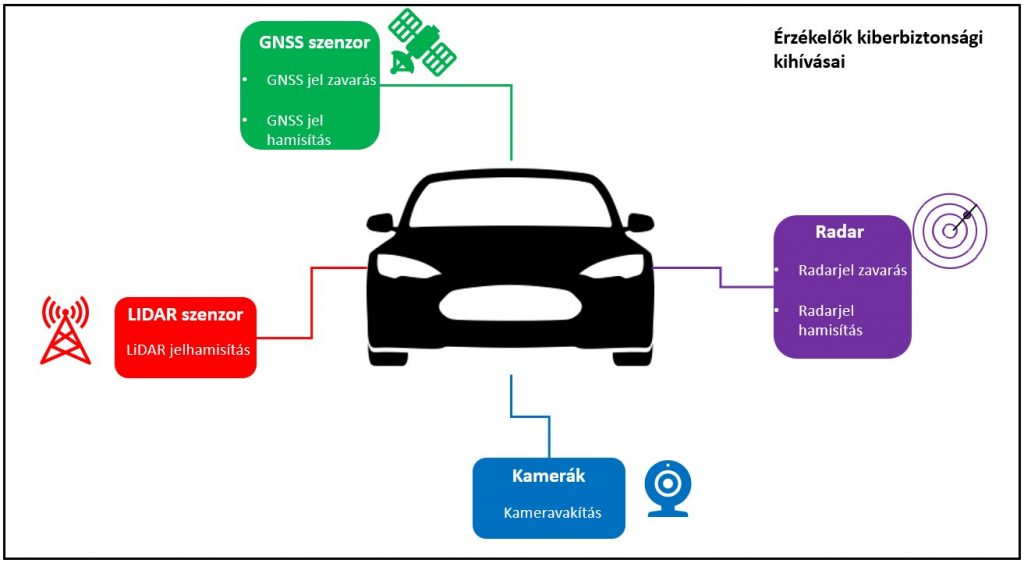
Az autonóm vezérlésű érzékelők kiberbiztonsági kihívásai
- Radarjelek meghamisítása: az elkövetők rádiófrekvenciás jeleket rögzítenek, és ezeket a jeleket újra továbbítják, hogy a torzított információt juttassák el az érzékelőkhöz. A hamis jelek továbbítása azonban nem egyszerű, mert például a kutatók megpróbáltak hamis adatokat eljuttatni egy Tesla Model S gépjármű radarérzékelőjébe. A kísérlet sikertelen volt, mert az érzékelőnek alacsony volt az üresjárati időhöz viszonyított munkaszünete, ami megnehezítette a jelek pontos időintervallumban történő küldését.
- LiDAR hamisítás: az elkövetők nem valós jeleket állítanak elő, amelyek egy tárgyat ábrázolnak, és ezen hamis adatokat betáplálják a LiDAR-érzékelőbe.
- Kameravakítás: az önvezető közúti járművek szenzorai segítik a feldolgozó algoritmusokat a környezet feltérképezésében. Ezeket a kamerákat különböző tartományú fénykibocsájtásokkal vakítják el a támadók. Ennek a támadásának a hatását a redundancia növelésével lehet csökkenteni, ami azt jelenti, hogy több kameraszenzort, illetve egyéb távolságérzékelő szenzort kell implementálni.
- Radarzavarás: ekkor az elkövetők a tárolt jelek frekvenciáját és amplitúdóját módosítják a fázis megváltoztatása helyett. A manipulált jelek hatására a radarérzékelők nem észlelik azt a tárgyat, ahol a zavaró eszköz található.
- Globális navigációs műholdrendszer jelhamisítása: az elkövető ebben az esetben valós GNSS-jeleket sugároz annak érdekében, hogy megtévessze az autonóm közúti járművek GNSS-vevőegységeit. Az elkövetők a műholdak valódi jeleinek megfelelő jelek sugárzásával kezdik. Ezt követően a sugárzott jel teljesítményét fokozatosan növelik, és ezen megnövelt jelek eltérnek a célpont valós helyzetének jelölésétől. A GNSS-vevőegységeket gyakran úgy konfigurálják, hogy a legerősebb jeleket sugárzó állomás jeleit használják fel, így mikor a hamisított jel erősebb lesz, mint a valós, azt használja fel a jármű. Ezen támadás azért tud veszélyes lenni, mert ha olyan helyzetmeghatározást küldenek az eszköznek, amelyet más érzékelő nem tud felülbírálni, akkor baleset is történhet.
- Globális navigációs műholdrendszer jelzavarása: esetén a támadás abból a tulajdonságból indul ki, hogy a műholdak sugárzott jelei gyengék, amelyeket egy erősebb jelszórással meg lehet zavarni. Ekkor azonban az érzékelő a zavarásra használt jelet nem fogadja, de a valós jelet sem képes érzékelni. Ezen támadás kevésbé veszélyes, mint a jelhamisítás, mivel ekkor nem kerül a támadó kezébe a jelküldés kontrollja, tehát nem tudja a jármű működésében keletkező zavart irányított módon kontrollálni.
Források
Chen Yan, Wenyuan Xu, és Jianhao Liu, „Can you trust autonomous vehicles: Contactless attacks against sensors of self-driving vehicle”, Def Con 24, sz. 8 (2016): 109.
Nanda, Ashish, Deepak Puthal, Joel J. P. C. Rodrigues, és Sergei A. Kozlov. „Internet of Autonomous Vehicles Communications Security: Overview, Issues, and Directions”. IEEE Wireless Communications 26, sz. 4 (2019): 60–65.

