





Katona Gergő–Bányász Péter
Mára az önvezető járművek már nem csupán sci-fi filmekben megjelenő eszközök, hanem olyan termékek, amelyeket a mindennapokban is használhatunk. Elég csupán az M4-es metróra gondolni, amelynek a szerelvényei – kötött pályán – vezető nélkül közlekednek. Tervezetten három részes blogposzt sorozatunkban a nem kötött pályás járművek kiberbiztonsági kihívásaira fektetjük a hangsúlyt. A téma fontosságát egy szomorú aktualitás is illusztrálja, amely a poszt írásakor járta be a világsajtót: két személy életét vesztette 2021. április 19-én Houstonban egy önvezető járművel történt autóbalesetben.
A világon egyre nagyobb számban gyártanak olyan gépjárműveket, amelyek számos okos funkcióval segítik kényelmünket, védik életünket. Azonban ezen információs rendszerek ugyanúgy ki vannak téve a kibertérből érkező fenyegetéseknek, mint a hagyományosan használt informatikai eszközök. A sorozat első részében azt tisztázzuk, hogy milyen részekből épül fel az a rendszer, amelyre önvezető járműként hivatkozunk, az ezt követő részekben pedig a főbb rendszerelemek kockázatait vizsgáljuk meg.
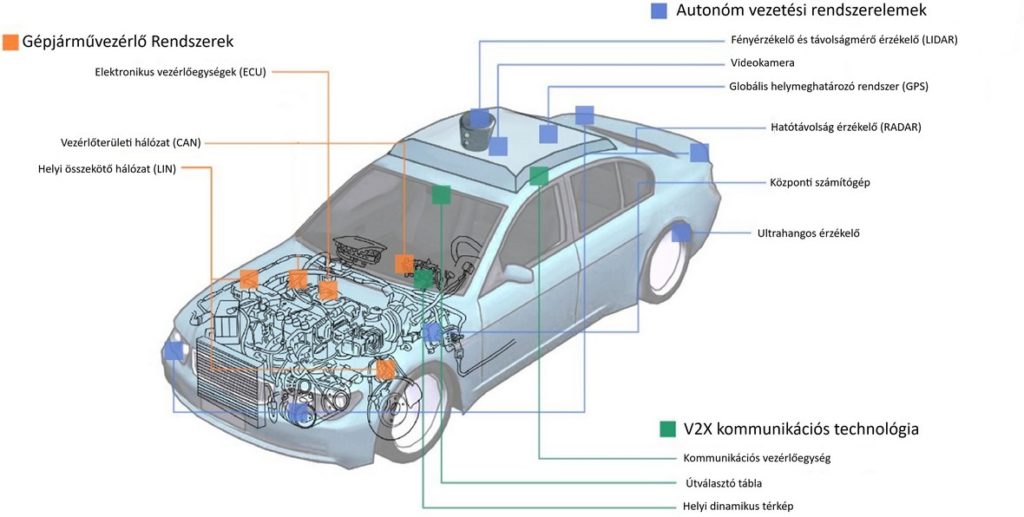
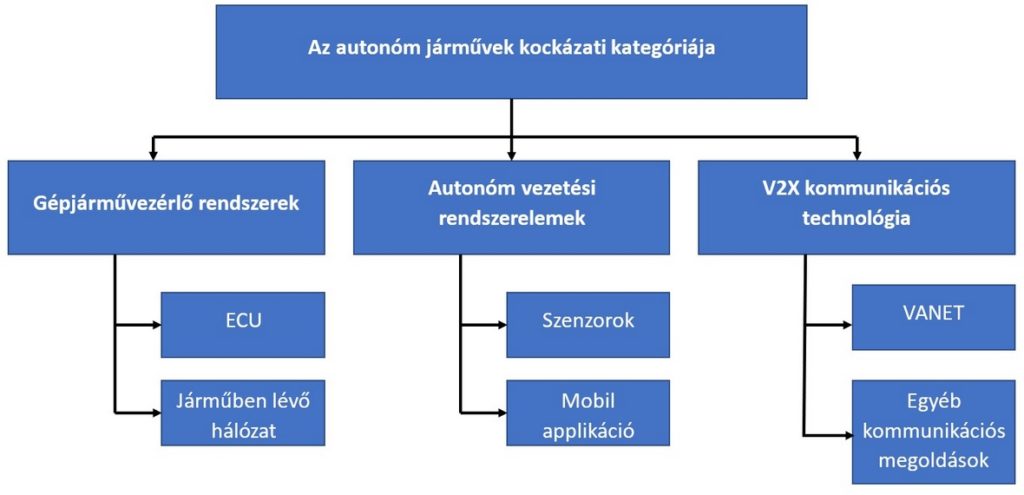
Az autonóm járművek biztonsági szempontjainak vizsgálatához három kulcsfontosságú rendszerelemet azonosításthatunk:
Gépjárművezérlő rendszerek A legfontosabb egységek ebben a kategóriában az elektronikus vezérlőegységek (electronic control units, ECU). A ECU vezérli például a jármű motorjának elektronikáját, az automatikus sebességváltót, az ajtó, az ülés, az elektromos zár, a légzsák, a légkondicionáló rendszer és a fényvezérlés moduljait. Jellemzően a kis- és közepes méretű járművek körülbelül 50 ECU-t tartalmaznak és legalább 70-et tartalmaznak a luxusautók. Egyes csúcskategóriás járművek akár 80 ECU-val is rendelkeznek. A járműben lévő hálózat összeköti az ECU-kat és továbbítja az adatokat közöttük. Ez a hálózat magában foglalja többek között a vezérlőterületi hálózatot (controller area network, CAN), helyi összekötő hálózatot (local interconnect network, LIN), ethernetet.
Autonóm vezetési rendszerelemek Az autonóm vezetési rendszerek kulcsfontosságú elemei:
- a rádióérzékelő és hatótávolság érzékelő (radio detection and range, RADAR), vagyis olyan érzékelőrendszer, amely rádióhullámok segítségével méri a cél távolságát, irányát, szögét és sebességét;
- a fényérzékelő és távolságmérő (light detection and ranging, LIDAR) érzékelő, amely rövidebb hullámhosszú lézert használ, hogy nagyobb mérési pontosságot és jobb térbeli felbontást érjen el, mint a RADAR;
- a videokamerák olvassák le a közlekedési lámpákat és a közúti jelzéseket, figyelik a gyalogosokat és az akadályokat;
- a globális helymeghatározó rendszer (Global Positioning System, GPS), amely során a GPS-vevő három vagy több GPS-műholdról továbbított jeleket gyűjt össze, hogy meghatározza a vevő helyzetét;
- a központi számítógép információt kap minden érzékelőtől, és kezeli a kormányzást, a gázpedált és a fékeket; a központi számítógépes szoftver értelmezi a szabályos vagy szabálytalan útviszonyokat;
- az ultrahangos érzékelőkkel mérik a nagyon közeli tárgyak (például a közeli járművek) helyzetét.
V2X kommunikációs technológia Az autó és a külső terminál közötti hálózati kommunikációt V2X-nek nevezik. Ezen technológia jármű-jármű (vehicle-to-vehicle V2V), jármű-infrastruktúra (vehicle-to-infrastructure V2I) és jármű-hálózat kommunikációból áll. Ezen kommunikációs formákat a járművek ad-hoc hálózata (Vehicle ad-hoc networks VANET), illetve olyan technológiák, mint a műholdas rádió vagy Bluetooth biztosíthatja. A VANET dedikált rövid hatótávolságú kommunikációt használ, amely az IEEE 802.11p szabványon alapul, amely biztonságos vezeték nélküli hozzáférést biztosít a járművek környezetében. Az IEEE 1609 egy magasabb szintű követelmény rendszer, amely az IEEE 802.11p szabványon alapszik, és meghatározza a biztonságos V2V és V2I kommunikációhoz szükséges szabványokat, architektúrákat és felületeket. A VANET hálózat tartalmaz egy járműben elhelyezkedő fedélzeti egységet (on-borad unti, OBU), illetve egy infrastrukturális útszéli egységeket (road-side unit, RSU). A fedélzeti egység egy kommunikációs vezérlőegységből, útválasztó táblából és helyi dinamikus térképből áll. A kommunikációs vezérlő egység pedig a jármű belső rendszerei és környezete közötti kommunikációra szolgál. Az útválasztási tábla a szomszédos jármű információkat és időbélyegeket tárolja. A helyi dinamikus térkép olyan térkép alapú adatbázis, amely információkat tárol az útviszonyokról és a járművet körülvevő forgalomról.
Az RSU egy eszköz a V2I kommunikációhoz. Vezetékes / vezeték nélküli hálózaton keresztül kommunikál a helykiszolgálókkal, az összes jármű nyomon követésére és forgalmi információk továbbítására szolgál. Az RSU eszközök alapvető infrastrukturális eleme az intelligens közlekedés irányítási rendszereknek, mivel a központ a járművek nyomon követésén túl, számos a közlekedéssel kapcsolatos információt tud megosztani a járművekkel.
A folytatásban a három fő rendszerelemet fenyegető releváns támadásokat, kockázatokat ismertetjük, hogy egy komplexebb képet kapjuk az autonóm járművek kiberbiztonsági kihívásairól.
Források
Daniel S. Fowler, Madeline Cheah, Siraj Ahmed Shaikh, Jeremy Bryans: Towards a Testbed for Automotive Cybersecurity, IEEE International Conference on Software Testing, Verification and Validation (ICST), IEEE (2017) pp. 540–541.
Daniel S. Fowler, Jeremy Bryans, Madeline Cheah, Paul Wooderson, Siraj A. Shaikh: A Method for Constructing Automotive Cybersecurity Tests, a CAN Fuzz Testing Example Pages 1–8. IEEE 19th International Conference on Software Quality, Reliability and Security Companion (QRS-C), IEEE (2019)
Rida Khatoun, Sherali Zeadally: Smart cities: concepts, architectures, research opportunities Commun ACM, 59 (8) (2016), pp. 46-57
Yoshiyasu Takefuji: Connected Vehicle Security Vulnerabilities [Commentary] IEEE Technology and Society Magazine, 37 (1) (2018), pp. 15-18.

